Mission overview
ESA’s ExoMars programme will deliver to the surface of Mars the European Rosalind Franklin Rover, tasked with searching for traces of life and to characterise the shallow subsurface environment.
The ExoMars Rosalind Franklin Mission (EXM-RFM) includes important contributions from NASA: the launch service, the lander’s descent engines, Radioisotope Heating Units (RHUs) for the Rover’s thermal control, and components of the MOMA instrument. The mission’s launch is scheduled for late 2028. RFM will reach Mars after a journey of approximately two years, longer than the usual 9 months. This trajectory has been chosen to ensure that touchdown takes place during the northern-hemisphere spring to guarantee plenty of sunlight on the Rover’s solar panels.
The main scientific objective of Rosalind Franklin is to search for signs of past and present life. To achieve this goal, the mission will land at an ancient site —rich in sedimentary deposits (clay minerals) that formed in the presence of abundant liquid water— and explore the area in a quest for finding morphological and chemical biosignatures.
After landing, Rosalind Franklin will deploy its solar panels and locomotion system. Ground control will study the surroundings to choose in which direction to egress. The Rover can use one of two sets of descent ramps to reach the surface. Once on the ground, Rosalind Franklin will move away from the lander to start its traverse, identify, reach, and investigate scientifically promising locations.
The Rover is equipped with a drill to collect samples at and below the surface. The drill has a maximum vertical reach of 2 m. Scientifically, this is very important because it is in the subsurface that organic molecules (some of which could be biosignatures) are preserved from the ravages of ionising radiation prevailing at the top. The deepest anyone has explored for organic molecules on Mars is ~15 cm —a record still held today by the Viking landers from the 1970’s. Therefore, the 2-m drill will allow us to explore for the first time Mars’s third dimension: depth.
The Rosalind Franklin Rover carries a suite of eight instruments collectively referred to as “the Pasteur payload”. They will be utilised to explore the landing site, identify targets for close-up studies, characterize the shallow subsurface, and analyse samples obtained with the drill.
Rover instruments in brief
- PanCam —the panoramic camera: To characterise the Rover’s geological context, select outcrops for investigation, and for rock textural studies. Two wide angle, stereo cameras (WACs) and one high-resolution camera (HRC).
- Enfys —infrared (IR) spectrometer: To assess the mineralogical composition of outcrops. Working with PanCam, Enfys will contribute to the selection of suitable targets for further analysis with other instruments.
- CLUPI —closeup imager: A camera system to acquire high-resolution, colour images of rocks, outcrops, drill fines, and drill samples.
- WISDOM —Water Ice and Subsurface Deposit Observation On Mars: A ground-penetrating radar to establish the stratigraphy under the Rover. WISDOM will be fundamental to help plan the drilling strategy.
- Ma_MISS —Mars Multispectral Imager for Subsurface Studies: Located in the drill tool, Ma_MISS will map the mineralogy of the borehole wall.
- MicrOmega —A visible plus IR imaging spectrometer: To examine the crushed sample material characterizing structure and composition at grain-size level.
- RLS —Raman Laser Spectrometer: To identify mineral phases at grain scale in the crushed sample, determine their composition, and detect the presence of carbon compounds (organic and inorganic).
- MOMA —Mars Organic Molecule Analyser: It is the Rover’s largest instrument. Its goal is to conduct a broad range, very high-sensitivity search for organic molecules in the collected sample. MOMA can extract organics in two ways: 1) Laser Desorption (LD) and 2) Thermal Volatilisation (TV), with or without derivatisation (Der) agents, followed by separation using four Gas Chromatograph (GC) columns. The identification of the evolved organic molecules is done with an ion trap Mass Spectrometer (MS). MOMA will search for molecular biomarkers to answer questions related to the potential origin, evolution, and distribution of life on Mars.
The Rover’s nominal lifetime is 218 martian solar days (sols). That is, this is the mission duration that the project team has designed for. It is often the case that “extended missions” become possible, although this is never guaranteed.
To communicate with Earth, Rosalind Franklin must talk through a satellite that can act as data relay “bridge”. The 2016 ExoMars Trace Gas Orbiter (TGO), already in operations in Mars orbit, will be used for data downlinks (Mars-to-Earth) and uplinks (Earth-to-Mars). TGO provides at least two good communications opportunities per sol. Typically, ground control uplinks a Rover activity plan on a morning TGO overfly; and Rosalind Franklin returns the results of its work in the following evening pass.
The Rover Operations Control Centre (ROCC) is in Turin, Italy. The ROCC will monitor and control Rosalind Franklin’s surface operations. Commands to the Rover will be transmitted through TGO using the ESA space communications network —Estrack— operated by ESA’s European Space Operations Centre (ESOC).
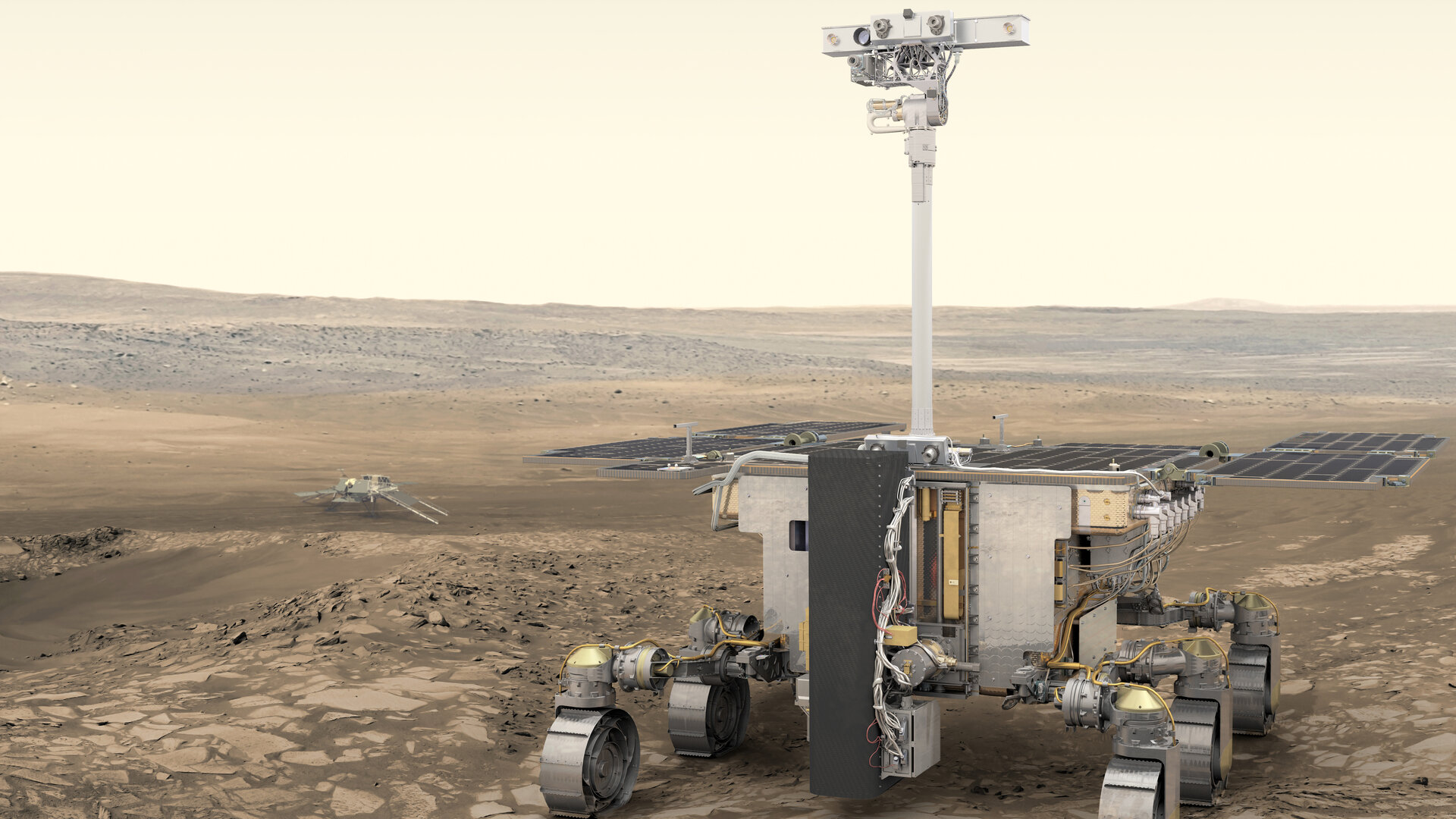
ExoMars Rosalind Franklin Rover
ESA’s ExoMars Rosalind Franklin Rover provides key mission capabilities: surface mobility (autonomous or controlled); subsurface drilling; and automatic sample collection, processing, and distribution to instruments. It uses solar panels to generate the required electrical power and is designed to survive the cold martian nights with the help of novel batteries and small radioisotope heating units.
Rosalind Franklin is highly autonomous. Scientists on Earth will designate target destinations based on compressed stereo images acquired by cameras mounted on the Rover mast. With this information the Rover can calculate navigation solutions to safely travel approximately 100 m per sol. To achieve this, the Rover creates digital maps from navigation stereo cameras to compute a suitable trajectory. The Rover employs close-up collision avoidance cameras to ensure safety while it executes the planned path.
Surface locomotion is achieved through six flexible wheels. Each wheel pair is suspended on an independently pivoted bogie (the articulated assembly that holds the wheel drives). Each wheel can be independently driven and steered. All wheels can be individually pivoted to adjust Rosalind Franklin’s height and angle with respect to the ground. This possibility allows implementing a wheel-walking gait, particularly useful in soft, non-cohesive soils like dunes. In addition, inertial measurement units are employed to ensure motion control. Finally, cameras are utilised to determine the Rover’s absolute attitude on the terrain and establish what is the direction to Earth.
PanCam and CLUPI images combined with Enfys IR spectra and with WISDOM ground penetrating radar data collected while travelling, will allow scientists to identify suitable outcrops and drilling locations, and devise appropriate instrument operational sequences to investigate them at close range.
Drilling in brief
Rosalind Franklin’s drill can operate autonomously to reach the required depth (maximum 2 m). To achieve its full length, three extension rods must be coupled to the drill tool.
The drill has been designed to penetrate different types of deposits envisaged on Mars, with sedimentary formations holding the highest science interest. The sizing scenario contemplates performing 6 Experiment Cycles (ECs) and 2 Vertical Surveys (VSs). An EC involves exploring a location to analyse one surface and one subsurface sample. A VS is reserved for the very best sites. It entails obtaining and analysing samples at 50 cm intervals from 0 to 2 m depth. This means that 20 samples shall be acquired and delivered by the drill for subsequent analysis.
The Drill Unit comprises the following elements:
- A Drill Tool – about 700 mm long, equipped with the sample acquisition device (including a shutter, movable piston, position and temperature sensors) and with Ma_MISS tip components (optical fibre, lamp, window, reflector).
- A set of three Extension Rods – about 500 mm each, designed to enable penetration depth to 2 metres. They are provided with electrical and optical contacts to guarantee transmission of the reflected IR signal to the Ma_MISS spectrometer, located in the upper part of the Drill Unit.
- A Rotation-Translation Group – including the sliding carriage motors and sensors, the gear mechanisms, and the Ma_MISS optical rotary joint.
- A Drill Box Structure – including the clamping system for the rods (rod magazine group), and the automatic engage-disengage mechanism to couple them. On the drill box structure are installed the Ma_MISS spectrometer and the drill proximity electronics.
- A back-up Drill Tool – to be used in case of off nominal scenarios.
- The Drill Unit is supported by a dedicated positioning system, capable of deploying it from its storage position on the front of the Rover chassis to its vertical operational position, and to permit the acquisition and delivery of the soil samples to the Analytical Laboratory Drawer (ALD) inlet port.
The drill houses the Ma_MISS IR spectrometer, whose observation window is located some 20 cm above the drill tip. As the drill progresses, Ma_MISS can investigate the borehole wall’s mineralogy. This is important because the temperature in the subsurface (on average –60ºC) is much colder than what the sample will experience after it is extracted. Ma_MISS is the only contact instrument that can interrogate the layers from which the sample is obtained. The science team can compare its readings with what other instruments will measure later and check whether the sample has undergone any changes.
The drill collects small, 3-cm long x 1-cm diameter samples that can be rocky cores or fragments. The material is “trapped” within the sample chamber, which forms when the central piston in the drill tip is retracted.
Once the sample has been secured in the drill chamber, the Rover retracts the drill string, separates and stows the various segments, and prepares to deliver its catch. The drill provides the sample by actuating once again the sample chamber’s central piston, pushing it out from the drill tip. The sample falls on a hand-like device extending to receive it, at the front of the Rover — the Core Sample Transport Mechanism (CSTM).
While the sample is on the CSTM, it can be imaged using PanCam and CLUPI. It is the last chance to observe it before ingestion into the analytical laboratory drawer (ALD).
Analytical laboratory in brief
The Analytical Laboratory Drawer (ALD) hosts three instruments and several miniaturized sample handling and processing mechanisms. After ingestion, the sample is crushed into fine particles. By means of a dosing station the powder can be presented to the instruments.
A unique aspect of Rosalind Franklin’s ALD suite is that the same mineral grains can be studied by MicrOmega, RLS, and MOMA-LDMS to achieve a very complete mineralogic and chemical composition characterisation. MOMA’s ultraviolet laser desorption technique — implemented for the first itme on this mission — facilitates the extraction of organic molecules without activating oxidant present in the sample, something that has complicated most previous missions seeking to study organic compounds.
Looking for signatures of life on Mars
An accurate visual and spectral characterisation of the surface is fundamental to establish the geological context at the sites that the Rover will visit. This can be complemented by electromagnetic subsurface investigations, which will further contribute to understand the depositional environment (e.g., sedimentary, volcanic, aeolic). Knowledge of the geological history of past water environments constitutes a necessary step in the search for traces of past or present signatures of life on Mars.
Rosalind Franklin’s Pasteur payload has been conceived to work as a single, well-oiled discovery machine to help scientists conduct a step-by-step exploration of Mars, beginning at panoramic (metre) scale and progressively converging to smaller (sub-millimetre) studies —important for identifying possible morphological biosignatures —, concluding with the molecular detection an characterisation of organic compounds, in the hope of being able to find chemical signs of life.
Landing site
The Rosalind Franklin Mission will land in Oxia Planum, situated at the eastern margin of the Chryse basin, along the martian dichotomy border, at 18ºN.
During the landing site selection process, criteria included both scientific and engineering factors. For example, the Rover should land at a scientifically interesting site or find one within a 1 km drive from the touchdown point. Numerous targets should also be accessible along a typical 2 km traverse planned during the nominal mission of 218 sols.
The selected landing ellipse in Oxia Planum lies in the lower part of a wide basin, with extensive exposures of clay-rich minerals that formed in the presence of liquid water some 4.0-3.9 billion years ago. The site sits in a wide catchment area of valley systems with the exposed rocks exhibiting different compositions, indicating a variety of deposition and wetting environments. The region’s mineralogy and conformation suggest that perhaps Oxia Planum may have formed part of the coastal borders of a large ocean once present in the northern hemisphere of Mars. This is an interesting hypothesis that the science team will investigate.
RFM will be the first mission targeting such an ancient, aqueous-mineral-rich location. The landing area’s deposits date from the “right time” in the history of Mars, when plentiful liquid water was available on its surface, the same period when life appeared on Earth.
A later period of volcanic activity covered early clays and other aqueous deposits, offering preservation for biosignatures against the planet’s harsh radiation and oxidation environment, and have been exposed by erosion only within the last few hundred million years.
In addition to the scientific aspects, engineering and operational constraints had to be considered in the landing site selection process to ensure a safe entry, descent, and landing. These include a relatively low elevation (–3 km MOLA), to allow the heatshield to decelerate sufficiently in the thin martian atmosphere. This, in turn, affords time to perform key sequential operations such as opening parachutes, ejecting heatshield and back shell, deploying the landing platform’s legs, and activating the descent engines. The horizontal and vertical wind speeds expected must also be also considered in the computation of descent parameters.
Knowledge of how the terrain slopes over various scales is also important because the lander uses radar to monitor its velocity and altitude. Slopes can alter the degree of certainty in the measured distance to the ground, with implications for fuel consumption and landing. Steep slopes and boulders taller than 35 cm — the clearance beneath the landing module — need to be avoided, although the Rover will be able to navigate these local hazards after egress.
The mission in four sentences
Features making Rosalind Franklin especially well-suited to search for traces of life on Mars:
- We will make a four-billion-year trip back in time to an epoch never explored, when Mars was more Earth-like.
- We will explore the martian subsurface for the first time.
- We have a great payload to hunt for potential biomolecule relics and establish their geological context.
- Rosalind Franklin will be able to make fundamental discoveries in organic chemistry, life sciences, and comparative planetology
More information on mission and instruments – Here is a collection of papers describing the Rosalind Franklin Mission in detail: Astrobiology | Vol 17, No 6-7
Rosalind Franklin goes to the movies – Videos describing various phases of the ExoMars rover’s surface mission can be found here: A saga for Rosalind Franklin – To Mars and back